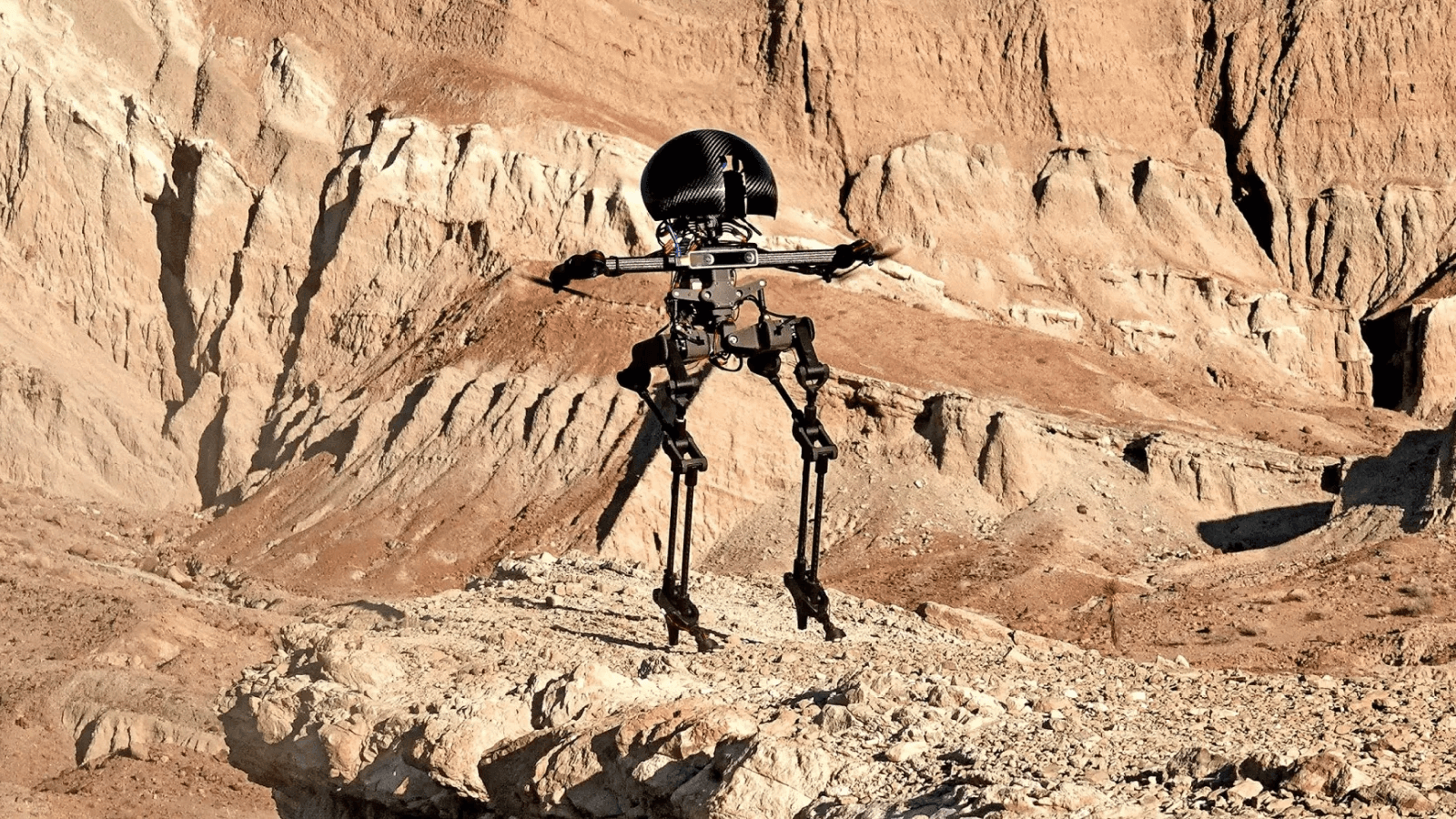
LEONARDO is a bipedal robot developed by Caltech's Center for Autonomous Systems and Technologies (CAST). It integrates walking with flying capabilities, enabling it to perform complex maneuvers such as walking a slackline, hopping, and even riding a skateboard. This innovative design combines multi-joint legs with propeller-based thrusters, allowing for precise balance and control. LEONARDO's unique locomotion system bridges the gap between terrestrial and aerial movement, offering potential applications in areas like advanced air mobility and autonomous navigation.