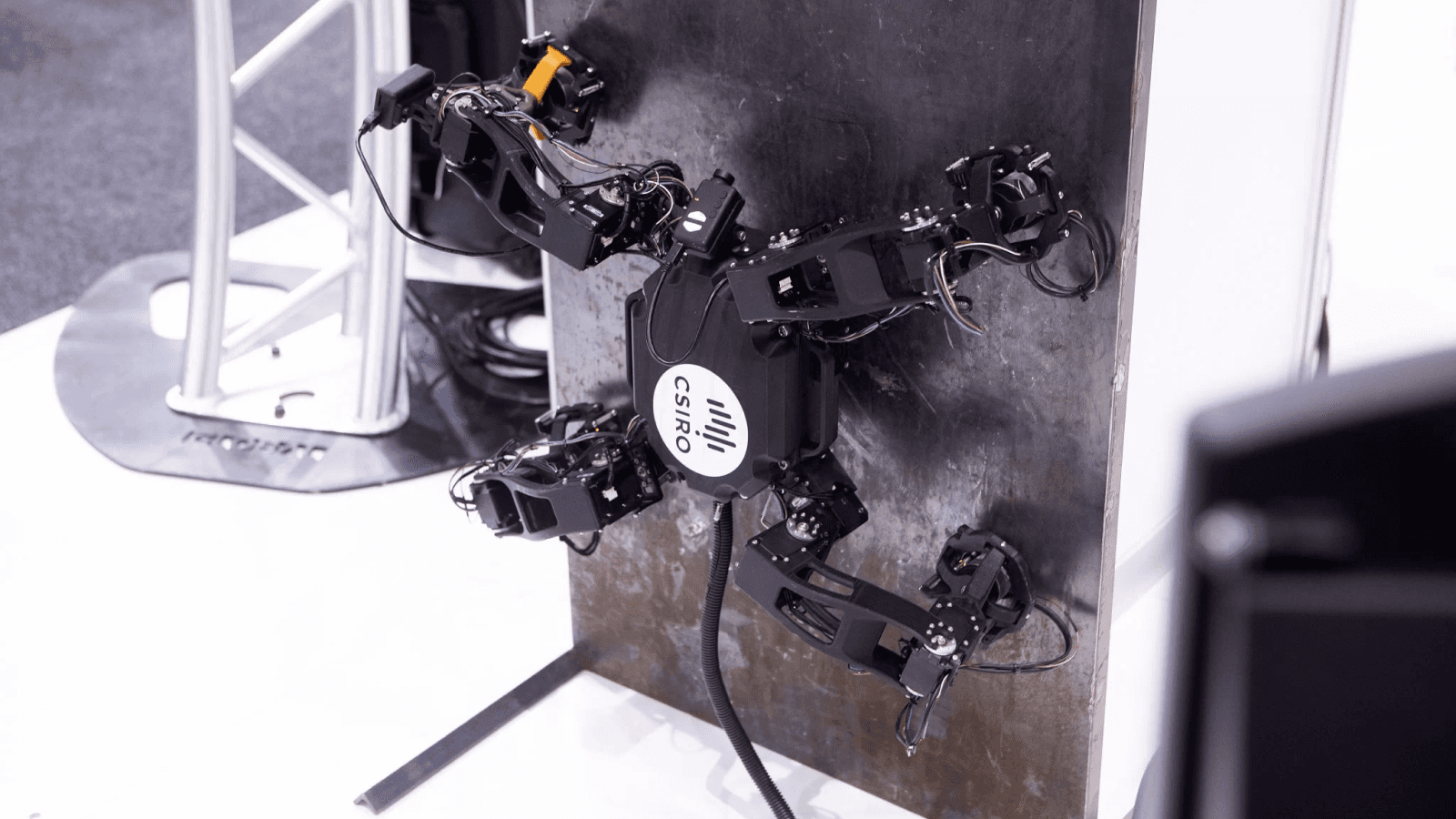
Magneto, developed by CSIRO (Commonwealth Scientific and Industrial Research Organisation), is a quadruped robot designed for inspection and exploration in confined and hazardous environments.
The robot features magnetic feet that allow it to climb and adhere to metallic surfaces, including vertical walls and ceilings. Its dexterous limbs enable precise manipulation and navigation of complex terrains, such as rubble, pipes, and machinery. Magneto’s integrated sensor suite provides detailed environmental mapping, making it suitable for search-and-rescue missions, industrial inspections, and maintenance tasks in inaccessible or high-risk areas.