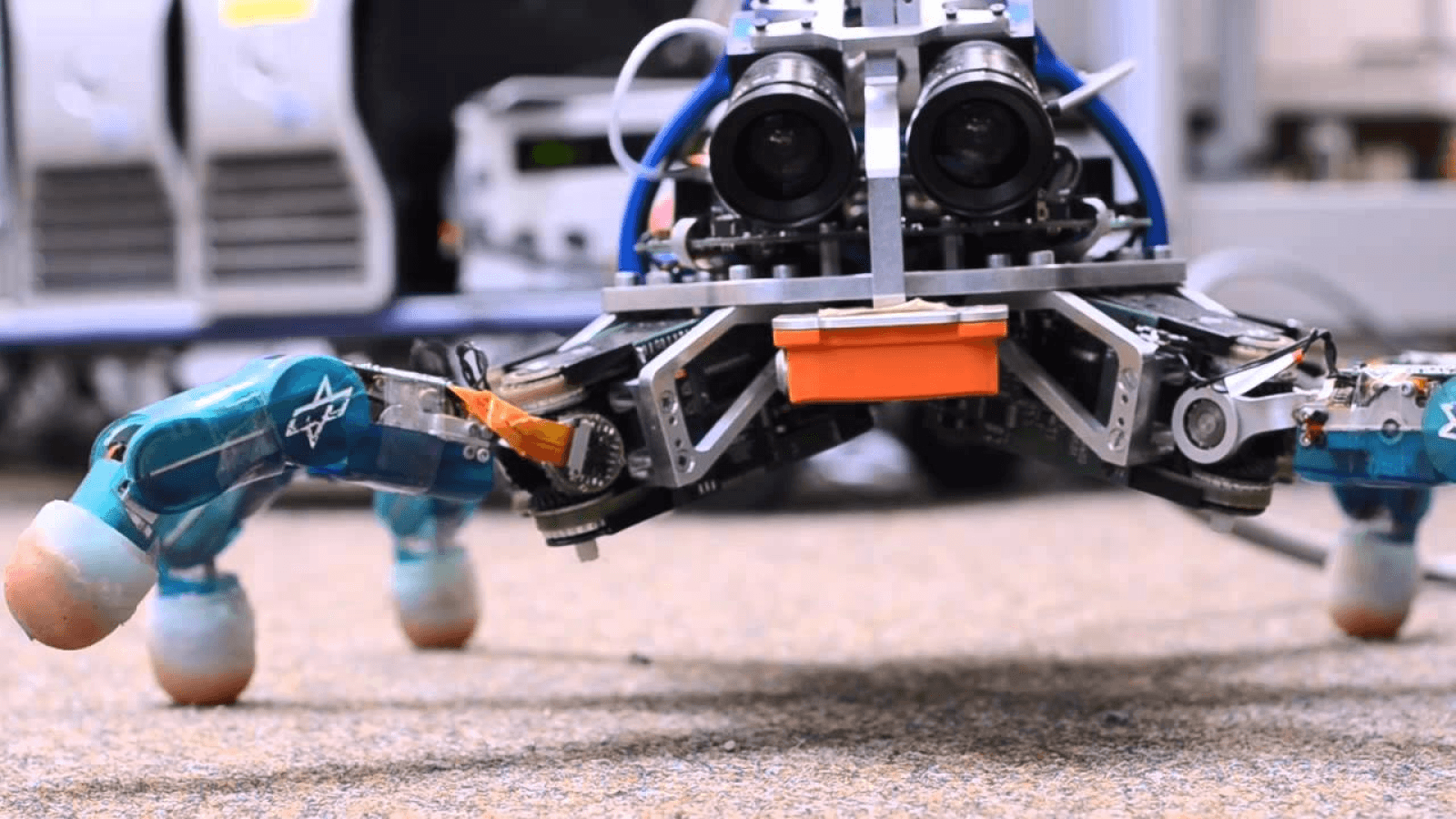
The DLR Crawler is an experimental, legged exploration robot developed by the German Aerospace Center (DLR). It uses the fingers of the DLR Hand II as legs, offering high-performance actuation and sensors. Designed for terrestrial and extraterrestrial exploration, the robot features autonomous navigation, flexible gait algorithms, and the ability to adapt to different terrains. It can operate in GPS-denied environments and adjust its movements based on terrain interaction.